- 2025/05/15公開
整形
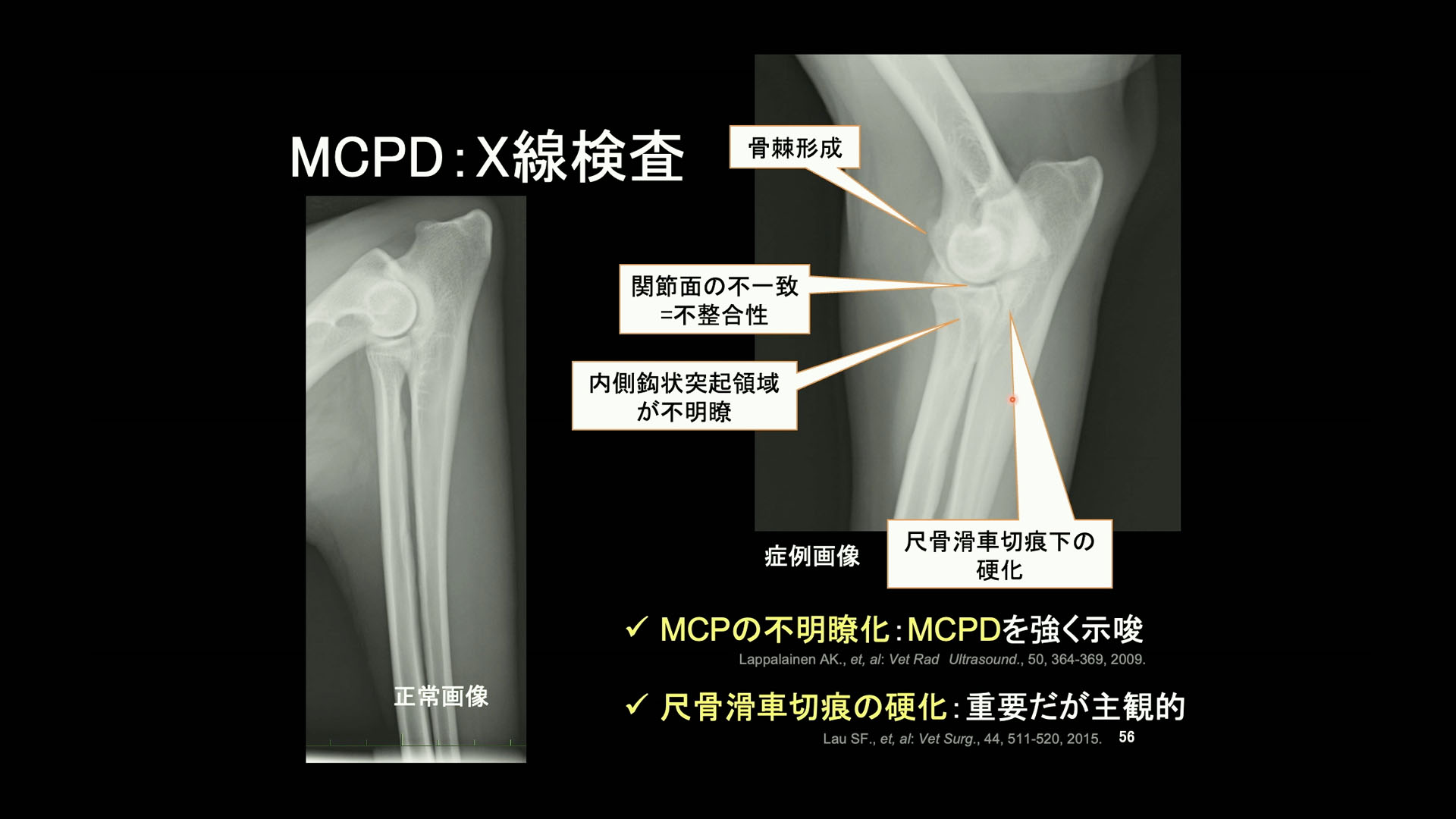
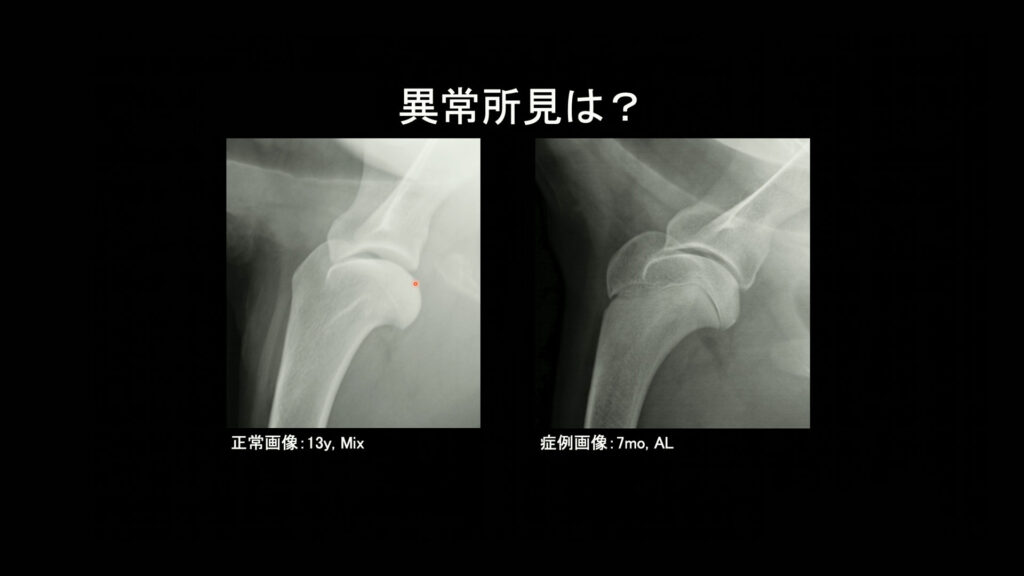
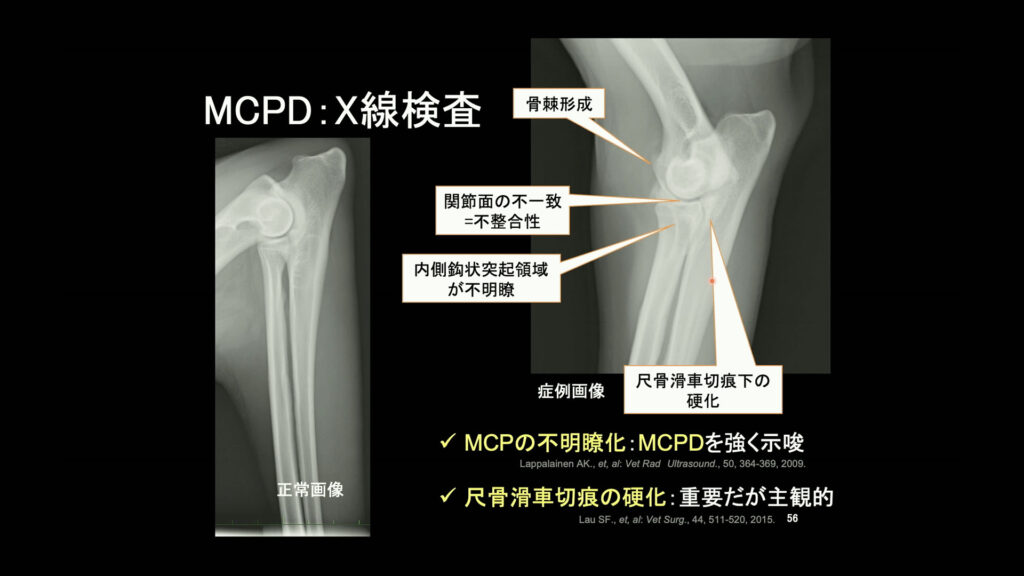
整形外科X線検査〜ポジショニングのポイント6〜「肘関節」


関連動画
麻酔

 実症例の麻酔計画「整形外科3〜大腿骨頭切除〜」
実症例の麻酔計画「整形外科3〜大腿骨頭切除〜」
実症例の麻酔計画「整形外科3〜大腿骨頭切除〜」波田 晃
実症例の麻酔計画「整形外科3〜大腿骨頭切除〜」
本動画では、股関節脱臼やレッグ・ペルテス病に対して行われる大腿骨頭切除術を題材に、周術期麻酔計画の考え方をご解説します。骨切除を伴う本手術は侵襲度が高く、術中・術後ともに強い疼痛管理が求められるため、「どこまで鎮痛を入れるか」「覚醒をどうコントロールするか、、、
外科
 整形外科手術後のリハビリテーション-Part5-〜肘関節〜
整形外科手術後のリハビリテーション-Part5-〜肘関節〜
整形外科手術後のリハビリテーション-Part5-〜肘関節〜矢倉 幸歩
整形外科手術後のリハビリテーション-Part5-〜肘関節〜
術後の肘関節リハビリテーションでは、外科的治療後の組織修復過程を十分に考慮しながら、可動域拡大と筋力回復を段階的に進めることが重要です。本症例では、3ヶ月時点でのX線評価や可動域測定、筋力評価に基づき、関節の安定性を確認したうえで負荷量を調整。さらに、、、
外科

 整形外科手術後のリハビリテーション-Part4-〜肩関節〜
整形外科手術後のリハビリテーション-Part4-〜肩関節〜
整形外科手術後のリハビリテーション-Part4-〜肩関節〜矢倉 幸歩
整形外科手術後のリハビリテーション-Part4-〜肩関節〜
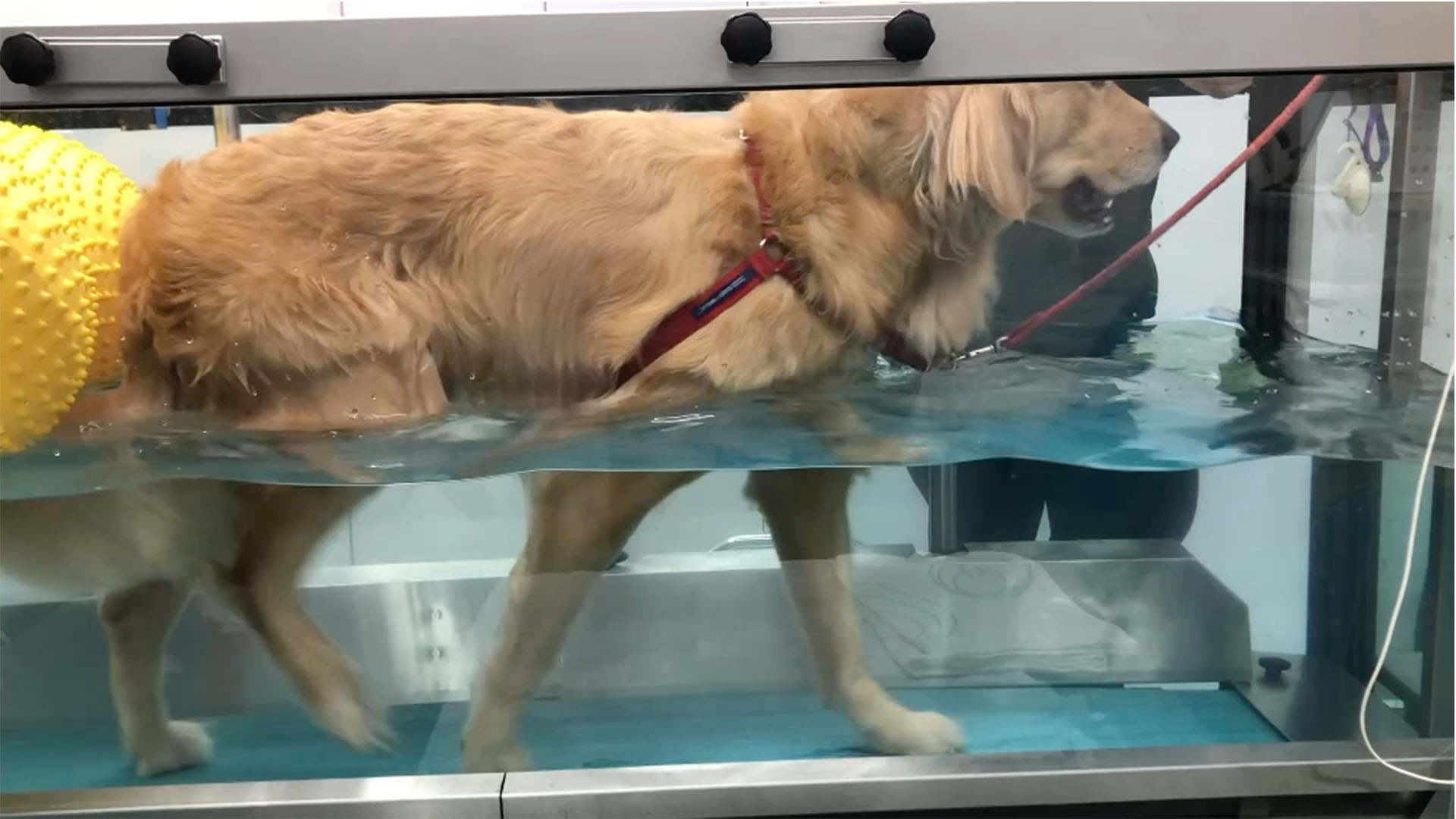
肩関節安定化術後の機能回復を、どのように客観的に評価し、次の一手へと繋げるか。本レクチャーでは、術後3か月間の経過観察と機能評価を軸にしたリハビリテーション戦略を解説します。筋緊張の軽減を目的としたマッサージ、可動域訓練、水中療法、ウエイトシフトリングなどを、、、
外科

 整形外科手術後のリハビリテーション-Part1-〜手術初期の対応〜
整形外科手術後のリハビリテーション-Part1-〜手術初期の対応〜
整形外科手術後のリハビリテーション-Part1-〜手術初期の対応〜矢倉 幸歩
整形外科手術後のリハビリテーション-Part1-〜手術初期の対応〜
整形外科手術後の動物は、安静が必要である一方、長期の不動は筋萎縮や関節拘縮を招き、回復を大きく遅らせます。本編では「術後初期」に焦点を当て、疼痛管理と早期リハビリのバランスをどのようにとるかを詳しくご解説。具体的には、安静期に適した受動的関節可動域訓練、、、
外科

 整形外科手術後のリハビリテーション-Part3-〜股関節〜
整形外科手術後のリハビリテーション-Part3-〜股関節〜
整形外科手術後のリハビリテーション-Part3-〜股関節〜矢倉 幸歩
整形外科手術後のリハビリテーション-Part3-〜股関節〜
股関節形成不全や大腿骨頭切除術後は、歩様改善と筋力回復に時間を要し、リハビリテーションの適否が予後を大きく左右します。本編では、股関節の安定性を補うための運動療法や、可動域を保ちながら筋力を強化する具体的アプローチを紹介。特に、患肢の荷重再開を促すための、、、
外科

 整形外科手術後のリハビリテーション-Part2-〜膝関節〜
整形外科手術後のリハビリテーション-Part2-〜膝関節〜
整形外科手術後のリハビリテーション-Part2-〜膝関節〜矢倉 幸歩
整形外科手術後のリハビリテーション-Part2-〜膝関節〜
犬の整形外科領域で最も頻度が高いのが膝関節疾患、とりわけ前十字靱帯断裂や膝蓋骨脱臼術後のリハビリテーションです。本編では、術後の荷重開始の判断基準や、関節安定性を維持しつつ筋力を回復させるためのリハビリプログラムをご解説。具体的には、低負荷での関節可動域運動から、、、